
任务
第一次听到PID还要回溯到大一懵懂时参加的智能车大赛,学长的讲解觉得能够理解,当然在例程已经完整给出、又对编程一窍不通的情况下,并没有亲自应用过这种思想。
比赛培训学长经验
比例(P)是最基本的控制,简单,可靠,但很难达到很好的性能
积分(I)可以提高控制精度,但容易引入延迟,造成控制迟钝
微分(D)可以提高灵敏度,但容易引入噪声,导致震荡
转向控制用PD,速度控制用PI
而今准备智能制造大赛的工业自动化线上赛项,需要对流程自动化方向进行学习,再次感到PID是控制算法的灵魂,慢慢学习积累中,整理学习资料于此。
PID基本知识
视频学习
CIMC-IMQ 【流程行业自动化】学习小组(2018)——SFC&PID讲解 讲解PID部分:0-15′
公式
理想的模拟式PID控制算法为:
(1) 
PID控制器可以调整的参数是KC、TI、TD。适当选取这三个参数
的数值,可以获得较好的控制质量。
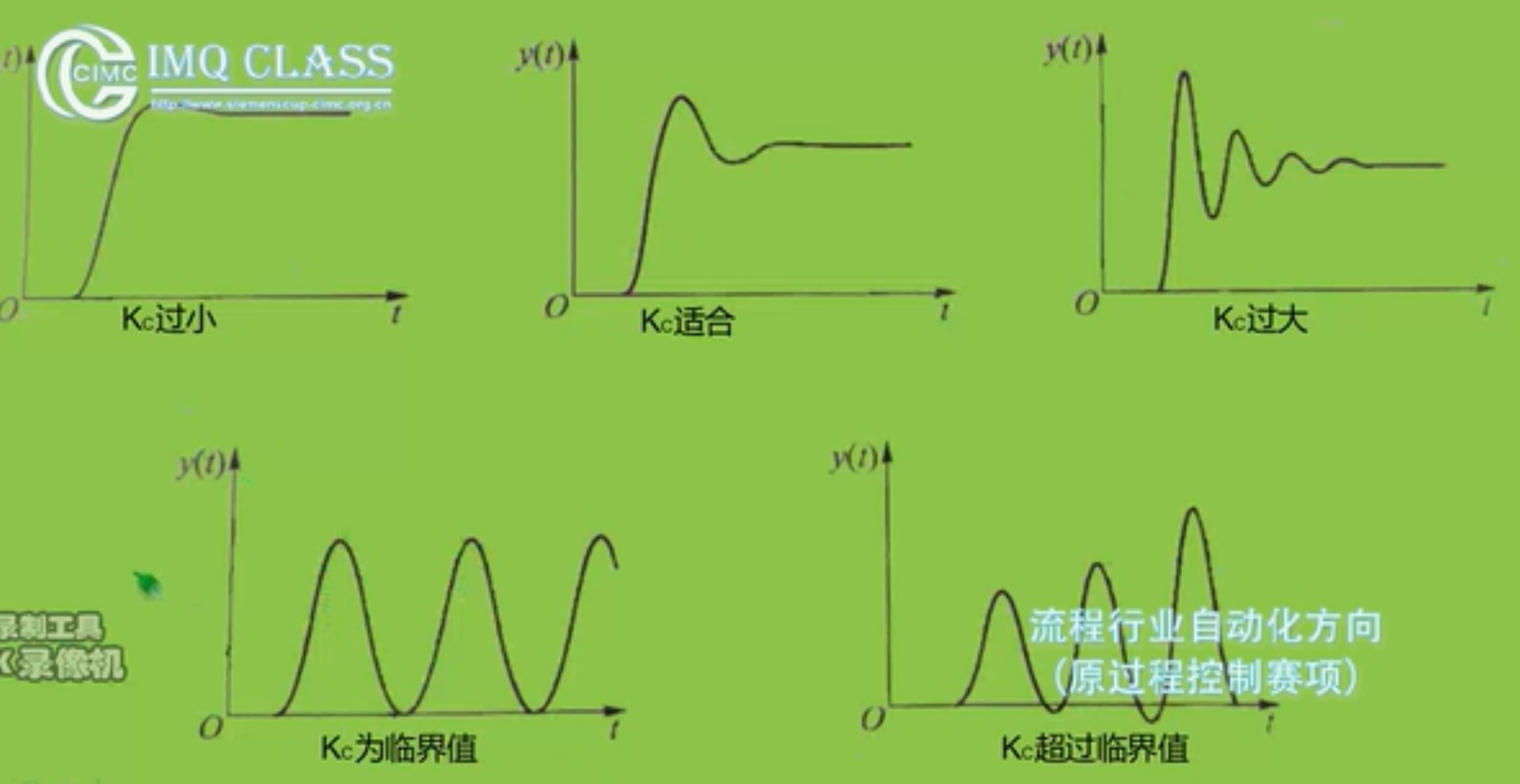
Proportion比例
- 1.Kc接近于0时,控制器的输出u不受输入偏差e的影响,相当于控制系统不工作
- 2.Kc很大时,只要有一个很小的输入偏差e出现,就会使控制器输出u发生很大的变化
- 3.Kc由小到大变化,系统将由稳定向振荡发展
- 4.比例调节是有差调节,比例调节的余差随着比例增益的增大而减小有差,成倍变化,余差
- 5.比例增益越大,意味着执行机构(调节阀、挡板等)的动作幅度较大,被调节变量的变化较为剧烈
- 6.比例调节可以单独使用,也可以和其它调节动作结合成PI、PD或PID调节动作
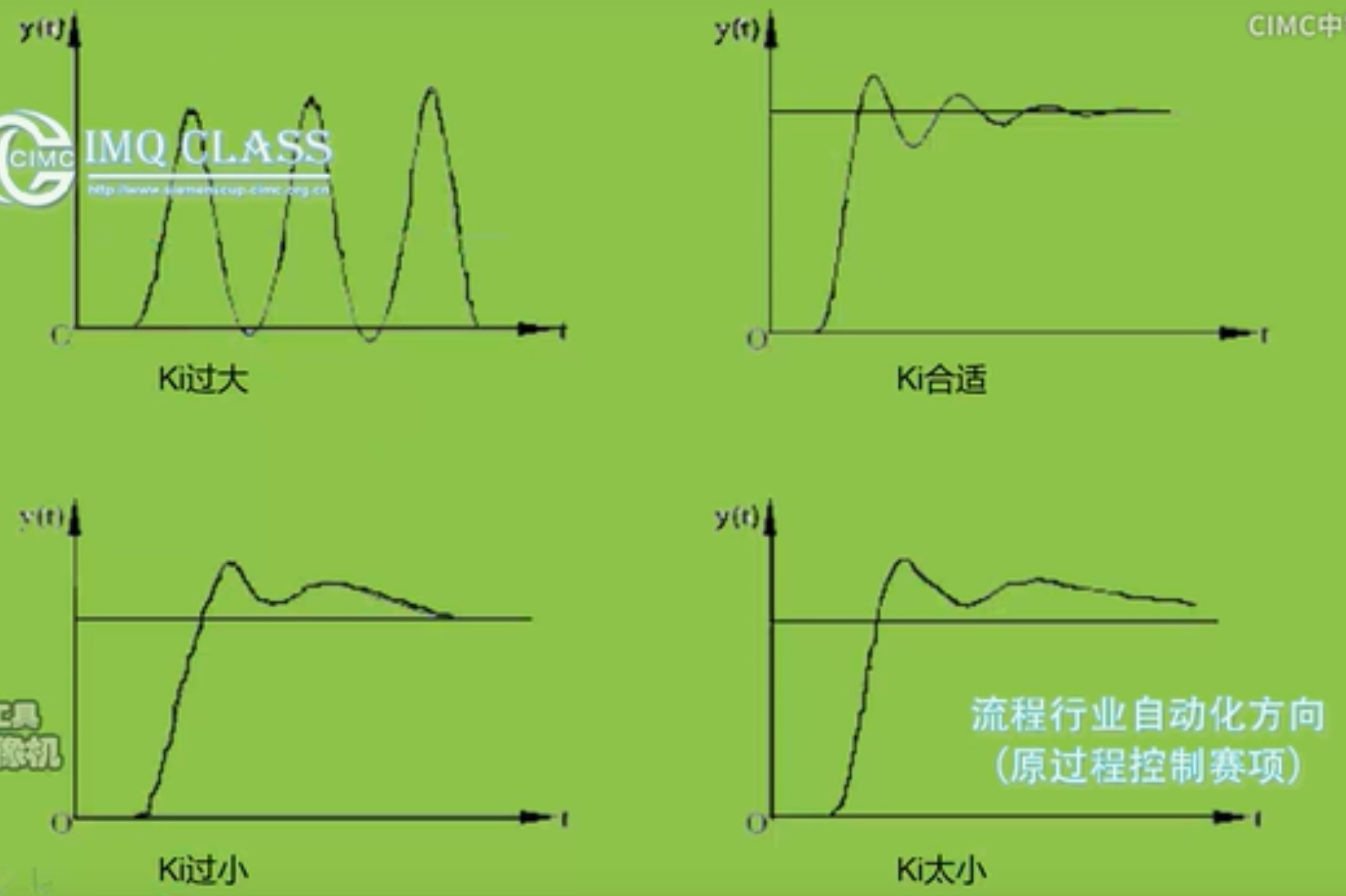
Integral积分
- 1.积分凋节将输入偏差e按时间进行累积,偏差存在输出就增大,直到消除偏差为止
- 2.Ki趋向于0时,积分作用消除
- 3.Ki很大时,积分作用强烈,消除余差的能力强,但容易引起振荡
- 4积分调节是无差调节。只有当偏差e为0时,积分调节器的输出才会保持不变
- 5.积分速度越大,执行机构的动作越快,越容易引起和加剧振荡
- 6.积分调节可以单独使用,但调节的过程很慢。通常,积分调节和其它调节动作结合成PI或PID调节动作
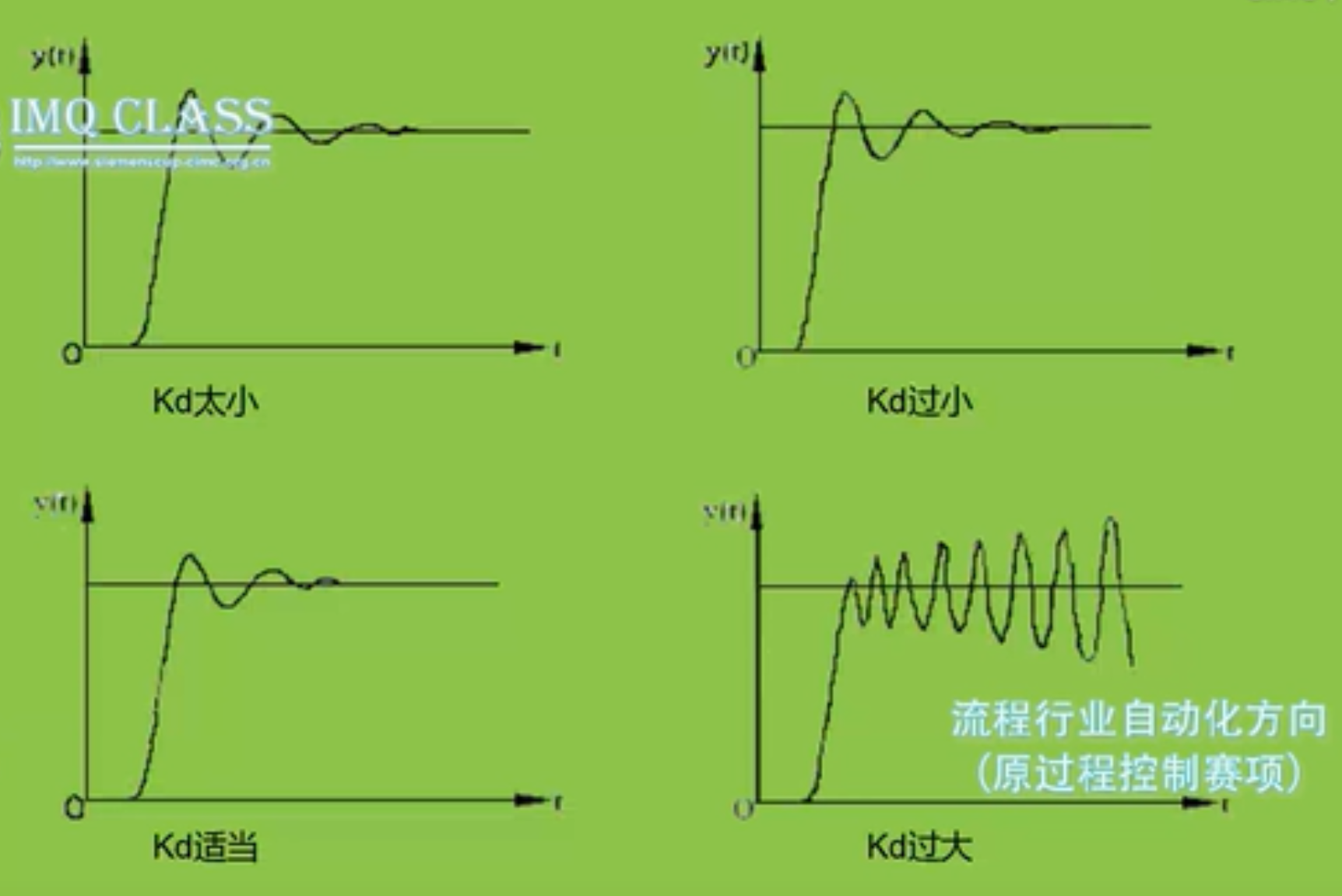
Derivative微分
- 1.微分调节的输出与输入偏差e的变化速度成正比,e变化越大,微分调节的输出越大
- 2.Kd为0时,微分作用消除
- 3.微分调节总是力图抑制被调量的振荡
- 4.微分调节只能起到辅助的调节作用,可以与其它调节动作结合成PD或PID调节动作
小结
- 积分控制规律主要用于消除余差;
- 微分控制规律主要用于改善动态特性;
- 比例控制规律为调节器的主体;
- 实际调节器设有P、I、D功能,适当组合,
分别可得P、PI、PD及PID调节规律。当TI置于无穷大时,
积分作用消失,当 Td =0 时,微分作用消失