任务
已知相机的位姿用四元数表示为q=[0.35,0.2,0.3,0.1],顺序为x,y,z,w,请编程实现:
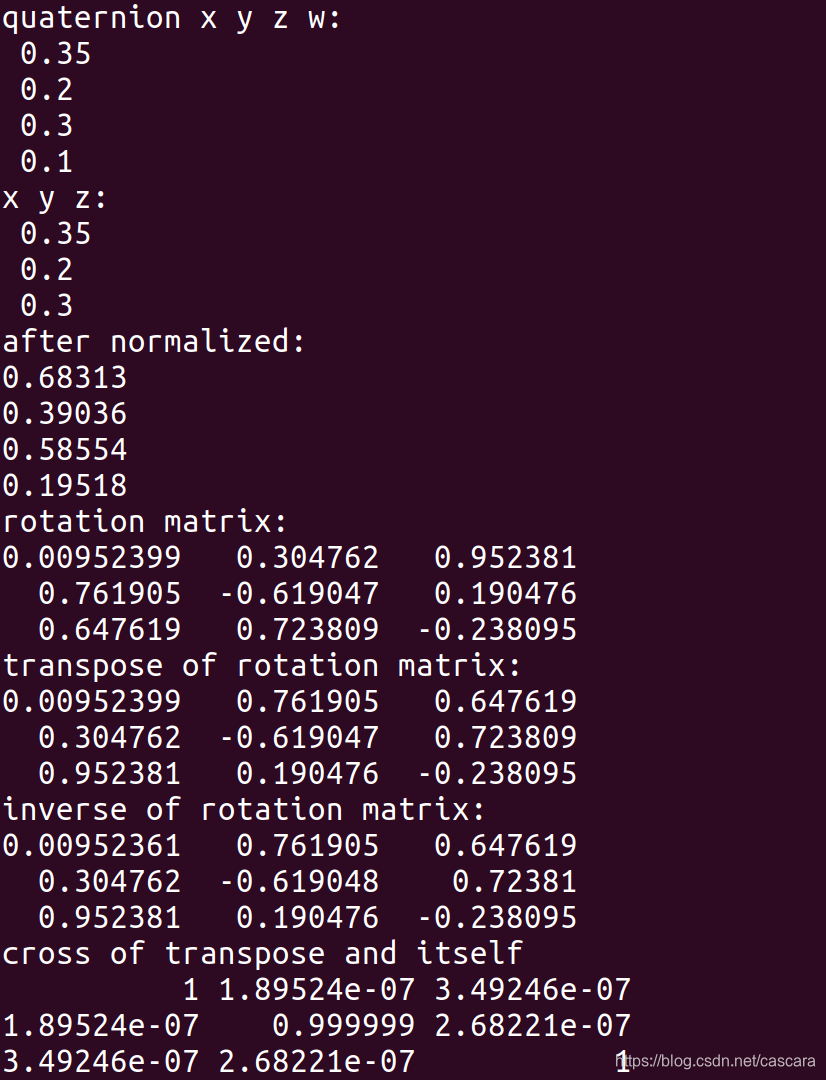
输出四元数对应的旋转矩阵、旋转矩阵的转置,旋转矩阵的逆矩阵,旋转矩阵乘以自身的转置,验证旋转矩阵的正交性。
题目来源:从零开始一起学习SLAM | 学习SLAM到底需要学什么?-计算机视觉life
过程
配置eigen库
安装
sudo apt-get install libeigen3-dev由于之前已经配置过ROS系统,而在eigen的官网可以看到ROS是使用Eigen的,所以系统中已经存在了Eigen库,但在编译时会报错,根据博文Ubuntu16.04安装eigen3并为其设置软链接,否则编译OpenCV库源码会提示出错提供的解决方案可以解决。
查看安装位置
locate eigen3发现库文件夹在/usr/include中下的eigen3中,如下建立软链接,即可
建立软链接
软链接的方式则是产生一个特殊的文件,该文件的内容是指向另一个文件的位置。
sudo ln -s /usr/include/eigen3/Eigen /usr/include/Eigen
sudo ln -s /usr/include/eigen3/unsupported /usr/include/unsupportedeigen使用
四元数
根据文档,四元数和一些旋转有关的定义需要引入头文件#include<Eigen/Geometry>
定义
初始化的顺序为w,x,y,z
Quterniond q((0.1,0.35,0.2,0.3);可以通过函数coeffs()按照x,y,z,w顺序打印成员,vec()打印虚数x,y,z部分
cout<<"quaternion x y z w:\n "<<q.coeffs()<<endl;
cout<<"x y z:\n "<<q.vec()<<endl; eigen库已经集成有高度优化的算法,可以通过初始化的方式直接将四元数转化为旋转矩阵的形式,但首先要进行归一化处理。
归一化
q.normalize();normalize()与normalized()区别:前者会改变当前变量的值,后者是临时的矩阵。
旋转矩阵
四元数和旋转矩阵都可以表示3维旋转,但四元数以其极小的数据量占有优势,四元数表示旋转的推导可参考之前的博文四元数旋转公式推导,今天又推导了四元数到旋转矩阵的转换,主要思路是利用公式:
$$
q\boldsymbol{x}q*=R\boldsymbol{x}
$$
可以推得旋转矩阵通过四元数的表示方法。
完整代码
#include<iostream>
#include<Eigen/Dense>
#include<Eigen/Geometry>
using namespace std;
using namespace Eigen;
int main(void)
{
//输出四元数对应的旋转矩阵、旋转矩阵的转置,旋转矩阵的逆矩阵,旋转矩阵乘以自身的转置,验证旋转矩阵的正交性。
//1.输出旋转矩阵
Quaternionf q(0.1,0.35,0.2,0.3);
cout<<"quaternion x y z w:\n "<<q.coeffs()<<endl;
cout<<"x y z:\n "<<q.vec()<<endl;
//单位化
Quaternionf qu=q.normalized();
cout<<"after normalized:\n"<<qu.coeffs()<<endl;
cout<<"rotation matrix:\n"<<qu.matrix()<<endl;
//2.输出矩阵转置
Matrix3f rm=qu.matrix();
Matrix3f rm_t=rm.transpose();
cout<<"transpose of rotation matrix:\n"<<rm_t<<endl;
//3.逆矩阵
Matrix3f rm_i=rm.inverse();
cout<<"inverse of rotation matrix:\n"<<rm_i<<endl;
//4.验证正交性
Matrix3f rm_o=rm_t*rm;
cout<<"cross of transpose and itself\n"<<rm_o<<endl;
return 0;
}编译
可以直接通过命令行编译为可执行文件quaternion2matrix
g++ quaternion2matrix.cpp -o quaternion2matrixcmake
学习使用cmake进行配置CMakeList.txt的编写
# CMake 最低版本号要求
cmake_minimum_required (VERSION 2.8)
# 项目信息
project (quaternion2matrix)
# 指定生成目标
add_executable(quaternion2matrix quaternion2matrix.cpp)要得到可执行文件需要在命令行输入下列命令:
make .cmake quaternion2matrix
结果展示